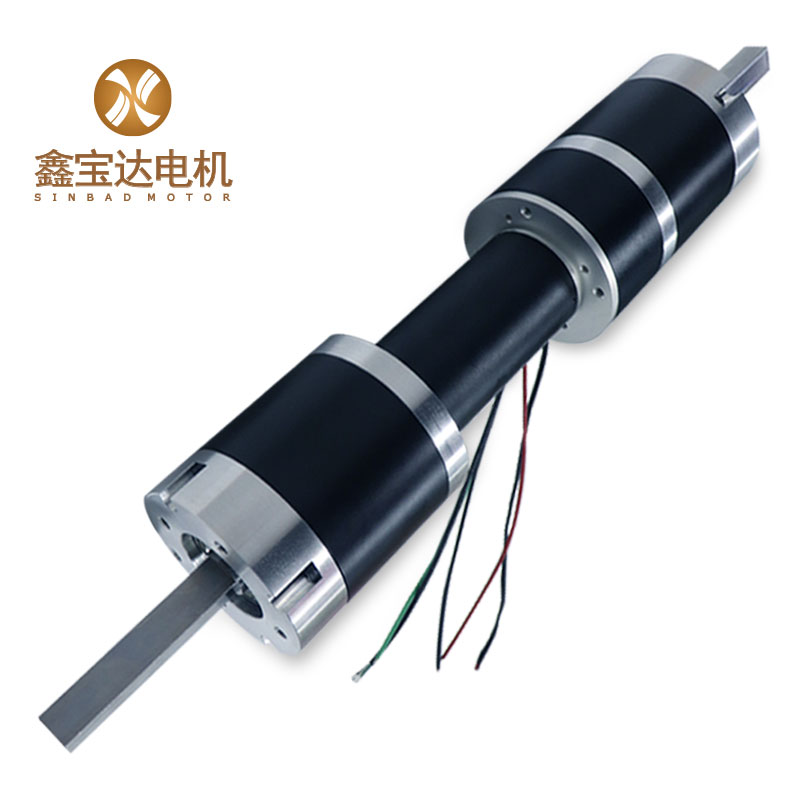
brushless DC မော်တာ တည်ငြိမ်စွာ လည်ပတ်နိုင်စေရန်အတွက်၊ အောက်ပါအချက်များ ကို ရရှိစေရမည်။
1. ဝက်ဝံများ၏ တိကျမှန်ကန်မှုသည် လိုအပ်ချက်များနှင့် ကိုက်ညီရမည်ဖြစ်ပြီး၊ ဂျပန်နိုင်ငံမှ တင်သွင်းသော မူရင်း NSK ဝက်ဝံများကို အသုံးပြုရမည်ဖြစ်သည်။
2. brushless DC မော်တာ၏ stator အကွေ့အကောက်မျဉ်းကွေးသည် ဒေတာလိုအပ်ချက်များအပေါ် အခြေခံရပါမည်။ အနည်းနှင့်အများ မော်တာ torque ကို ထိခိုက်စေလိမ့်မည်။
3. brushless DC motor rotor shaft သည် CNC ဂီယာ hobbing စက်ကို အသုံးပြု၍ manual gear hobbing ဖြင့် မအောင်မြင်နိုင်သော မြင့်မားသောတိကျမှုလိုအပ်ပါသည်။
4. DC မော်တာ stator ရှိ burrs များကိုဖယ်ရှားရမည်။ သေနတ်ဖြင့်မှုတ်ခြင်းဖြင့် မဖယ်ရှားနိုင်သော်လည်း ကော်ဖြင့် ဖယ်ရှားနိုင်သည်။
5. အာရုံခံကိရိယာများအသုံးပြုခြင်းသည် ထောင့်ချိုးအနေအထားနှင့် brushless DC မော်တာ၏ ရဟတ်ထောင့်ကို တိကျစွာမှတ်တမ်းတင်နိုင်သည်။ တိကျသောတိုင်းတာမှု၏တိကျမှုသည် လည်ပတ်နေစဉ်အတွင်း brushless DC မော်တာ၏ torque တုန်ခါမှုကို လျှော့ချနိုင်ပြီး brushless DC မော်တာ၏လည်ပတ်မှုကို ပိုမြန်စေသည်။ စွမ်းအင်ပြောင်းလဲခြင်း ထိရောက်မှု မြင့်မားသော်လည်း ပိုမိုတည်ငြိမ်သည်။
6. Brushless DC မော်တာ၏ အကာအကွယ်အဆင့်သည် DC မော်တာအား ပါဝါမရှိဘဲ လှည့်သည့်အခါ၊ ထုတ်ပေးသော ကြေးနီဝါယာကြိုးကို ထိုးဖောက်ဝင်ရောက်ပြီး မောင်းနှင်မည်မဟုတ်သောကြောင့် အကာအကွယ်အဆင့်ဖြစ်ရပါမည်။
စာတိုက်အချိန်- မေ ၂၀-၂၀၂၄