
တေးရေး
၁။ အမြဲတမ်းသံလိုက် DC မော်တာ:
၎င်းတွင် stator poles၊ rotors၊ brushes၊ casings စသည်တို့ ပါဝင်ပါသည်။
stator poles များကို အမြဲတမ်းသံလိုက် (အမြဲတမ်းသံလိုက်သံမဏိ)၊ ferrite၊ alnico၊ neodymium သံ boron နှင့် အခြားပစ္စည်းများဖြင့် ပြုလုပ်ထားသည်။ ၎င်း၏ဖွဲ့စည်းပုံအရ ၎င်းကို cylindrical အမျိုးအစားနှင့် tile အမျိုးအစား ဟူ၍ အမျိုးအစားများစွာ ခွဲခြားနိုင်သည်။
rotor ကို ယေဘုယျအားဖြင့် laminated silicon steel sheets များဖြင့် ပြုလုပ်ထားပြီး enameled wire ကို rotor core ၏ slot နှစ်ခုကြားတွင် ပတ်ထားသည် (slot သုံးခုတွင် windings သုံးခုရှိသည်)၊ ထို့နောက် commutator ၏ metal sheets များတွင် အသီးသီး welded လုပ်ထားသည်။
ဘရက်ရှ်သည် ပါဝါထောက်ပံ့မှုနှင့် ရိုတာကွင်းကို ဆက်သွယ်ပေးသော လျှပ်ကူးပစ္စည်းတစ်ခုဖြစ်ပြီး လျှပ်ကူးနိုင်စွမ်းနှင့် ယိုယွင်းပျက်စီးမှုခံနိုင်ရည် ဂုဏ်သတ္တိနှစ်ခုရှိသည်။ အမြဲတမ်းသံလိုက်မော်တာများ၏ ဘရက်ရှ်များသည် single-sex သတ္တုပြားများ သို့မဟုတ် သတ္တုဂရပ်ဖိုက်ဘရက်ရှ်များနှင့် လျှပ်စစ်ဓာတုဗေဒဆိုင်ရာ ဂရပ်ဖိုက်ဘရက်ရှ်များကို အသုံးပြုသည်။
၂။ ဘရပ်ရှ်မဲ့ DC မော်တာ:
၎င်းကို အမြဲတမ်းသံလိုက်ရိုတာ၊ multi-pole winding stator၊ position sensor စသည်တို့ဖြင့် ဖွဲ့စည်းထားသည်။ brushless DC မော်တာသည် brushless ဖြင့် သွင်ပြင်လက္ခဏာရှိပြီး semiconductor switching devices (ဥပမာ Hall element များ) ကိုအသုံးပြု၍ electronic commutation ကို အကောင်အထည်ဖော်သည်၊ ဆိုလိုသည်မှာ electronic switching devices များကို ရိုးရာ contact commutators များနှင့် brushes များကို အစားထိုးရန် အသုံးပြုသည်။ ၎င်းသည် မြင့်မားသောယုံကြည်စိတ်ချရမှု၊ commutation spark မရှိခြင်းနှင့် စက်ပိုင်းဆိုင်ရာဆူညံသံနည်းပါးခြင်းတို့၏ အားသာချက်များရှိသည်။
position sensor သည် rotor position ပြောင်းလဲမှုနှင့်အညီ stator winding ၏ current ကို အစီအစဉ်အတိုင်း ပြောင်းလဲပေးသည် (ဆိုလိုသည်မှာ stator winding နှင့် နှိုင်းယှဉ်ပါက rotor magnetic pole ၏ position ကို ထောက်လှမ်းပြီး သတ်မှတ်ထားသော position တွင် position sensing signal ကို ထုတ်ပေးသည်။ ၎င်းကို signal conversion circuit မှ လုပ်ဆောင်ပြီးနောက် ဖယ်ရှားသည်။ power switch circuit ကို ထိန်းချုပ်ပြီး သတ်မှတ်ထားသော logic relationship အရ winding current ကို ပြောင်းသည်)။

၂။ ဘရပ်ရှ်မဲ့ DC မော်တာ:
၎င်းကို အမြဲတမ်းသံလိုက်ရိုတာ၊ multi-pole winding stator၊ position sensor စသည်တို့ဖြင့် ဖွဲ့စည်းထားသည်။ brushless DC မော်တာသည် brushless ဖြင့် သွင်ပြင်လက္ခဏာရှိပြီး semiconductor switching devices (ဥပမာ Hall element များ) ကိုအသုံးပြု၍ electronic commutation ကို အကောင်အထည်ဖော်သည်၊ ဆိုလိုသည်မှာ electronic switching devices များကို ရိုးရာ contact commutators များနှင့် brushes များကို အစားထိုးရန် အသုံးပြုသည်။ ၎င်းသည် မြင့်မားသောယုံကြည်စိတ်ချရမှု၊ commutation spark မရှိခြင်းနှင့် စက်ပိုင်းဆိုင်ရာဆူညံသံနည်းပါးခြင်းတို့၏ အားသာချက်များရှိသည်။
position sensor သည် rotor position ပြောင်းလဲမှုနှင့်အညီ stator winding ၏ current ကို အစီအစဉ်အတိုင်း ပြောင်းလဲပေးသည် (ဆိုလိုသည်မှာ stator winding နှင့် နှိုင်းယှဉ်ပါက rotor magnetic pole ၏ position ကို ထောက်လှမ်းပြီး သတ်မှတ်ထားသော position တွင် position sensing signal ကို ထုတ်ပေးသည်။ ၎င်းကို signal conversion circuit မှ လုပ်ဆောင်ပြီးနောက် ဖယ်ရှားသည်။ power switch circuit ကို ထိန်းချုပ်ပြီး သတ်မှတ်ထားသော logic relationship အရ winding current ကို ပြောင်းသည်)။
၃။ မြန်နှုန်းမြင့် အမြဲတမ်းသံလိုက် brushless မော်တာ:
၎င်းကို stator core၊ magnetic steel rotor၊ sun gear၊ deceleration clutch၊ hub shell စသည်တို့ဖြင့် ဖွဲ့စည်းထားသည်။ မြန်နှုန်းတိုင်းတာရန်အတွက် မော်တာအဖုံးပေါ်တွင် Hall sensor ကို တပ်ဆင်နိုင်သည်။
ဘရက်ရှ်မော်တာများနှင့် ဘရက်ရှ်မဲ့မော်တာများ နှိုင်းယှဉ်ချက်
ဘရက်ရှ်မော်တာနှင့် ဘရက်ရှ်မဲ့မော်တာတို့၏ လျှပ်စစ်ဓာတ်အားထုတ်လုပ်မှုနိယာမကွာခြားချက်- ဘရက်ရှ်မဲ့မော်တာကို ကာဗွန်ဘရက်ရှ်နှင့် commutator ဖြင့် စက်ပိုင်းဆိုင်ရာ commutation လုပ်သည်။ ဘရက်ရှ်မဲ့မော်တာကို induction signal ကိုအခြေခံသည့် controller ဖြင့် အီလက်ထရွန်းနစ်နည်းဖြင့် commutation လုပ်သည်။
brushed motor နှင့် brushless motor တို့၏ power supply နိယာမသည် မတူညီဘဲ ၎င်း၏ အတွင်းပိုင်းဖွဲ့စည်းပုံလည်း မတူညီပါ။ hub motor များအတွက်၊ motor torque ၏ output mode (ဂီယာလျှော့ချရေးယန္တရားဖြင့် နှေးကွေးစေခြင်း ရှိ၊ မရှိ) မတူညီဘဲ ၎င်း၏ စက်ပိုင်းဆိုင်ရာဖွဲ့စည်းပုံလည်း မတူညီပါ။
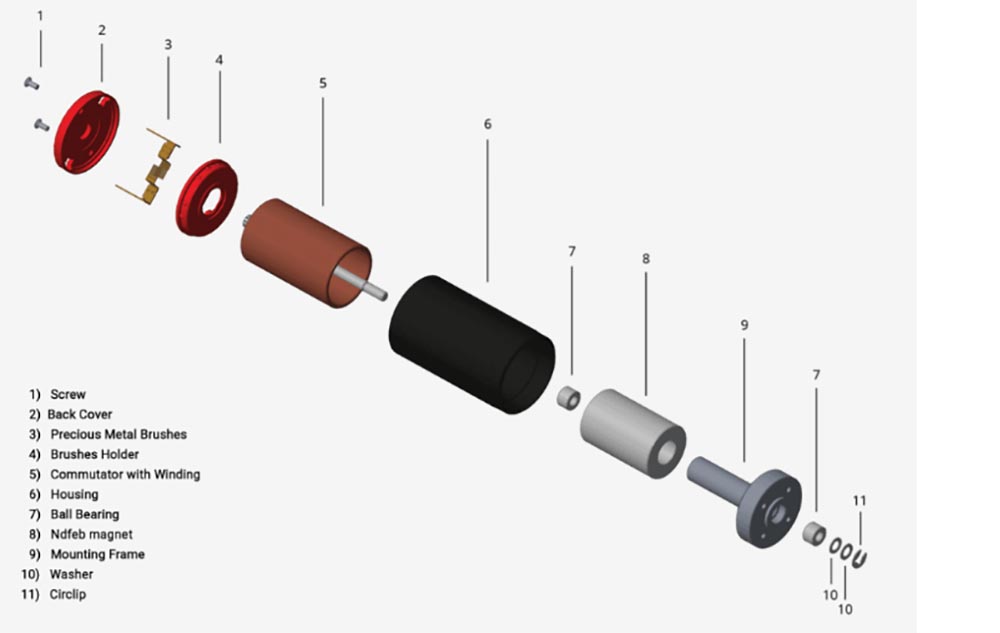
coreless brushed dc မော်တာ
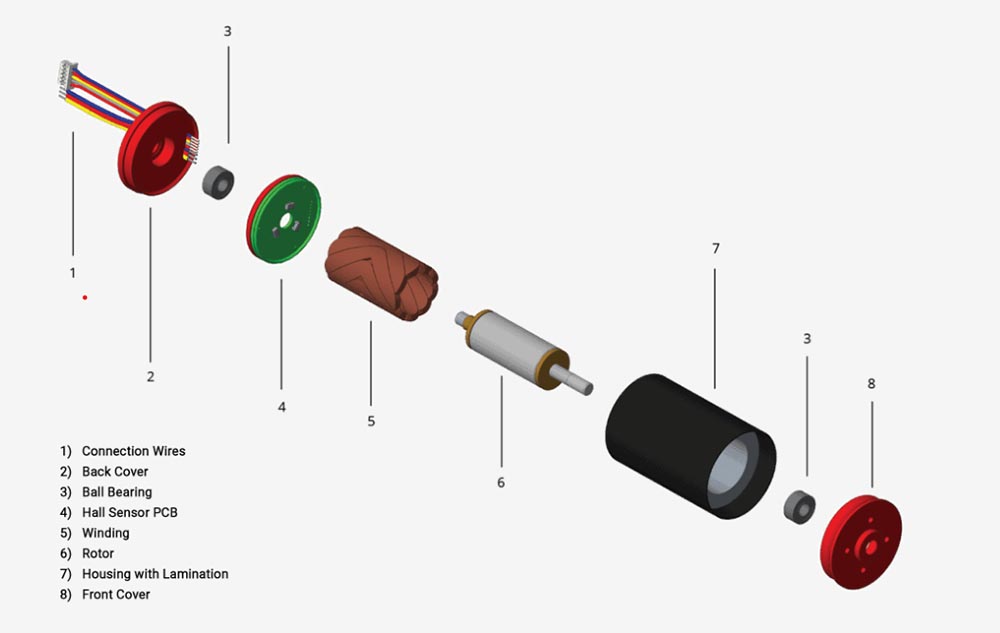
coreless brushless dc မော်တာ
ပို့စ်တင်ချိန်: ၂၀၁၉ ခုနှစ်၊ ဇွန်လ ၃ ရက်