
၂.၁ မော်တာဖွဲ့စည်းပုံတွင် ဘယ်ရင်နှင့် ၎င်း၏လုပ်ဆောင်ချက်
အသုံးများသော ပါဝါကိရိယာဖွဲ့စည်းပုံများတွင် မော်တာရိုတာ (ရိုးတံ၊ ရိုတာအူတိုင်၊ လှည့်ပတ်ခြင်း)၊ စတေတာ (စတေတာအူတိုင်၊ စတေတာလှည့်ပတ်ခြင်း၊ ဂျန့်ရှင်ဘောက်စ်၊ အစွန်းအဖုံး၊ ဝက်ဝံအဖုံး စသည်) နှင့် ချိတ်ဆက်အစိတ်အပိုင်းများ (ဝက်ဝံ၊ အလုံပိတ်၊ ကာဗွန်ဘရက်ရှ် စသည်) နှင့် အခြားအဓိကအစိတ်အပိုင်းများ ပါဝင်သည်။ မော်တာဖွဲ့စည်းပုံ၏ အစိတ်အပိုင်းအားလုံးတွင် အချို့သည် ရိုးတံနှင့် ရေဒီယယ်ဝန်ကို ထမ်းသော်လည်း ၎င်းတို့၏ကိုယ်ပိုင် အတွင်းပိုင်းဆွေမျိုးလှုပ်ရှားမှုမရှိပါ။ အချို့သည် ဝင်ရိုး၊ ရေဒီယယ်ဝန်ကို ထမ်းပြီးနောက် ၎င်းတို့၏ကိုယ်ပိုင် အတွင်းပိုင်းဆွေမျိုးလှုပ်ရှားမှုရှိသော်လည်း ဝင်ရိုး၊ ရေဒီယယ်ဝန်ကို ထမ်းခြင်းမရှိပါ။ ဝက်ဝံများသာလျှင် အတွင်းဘက်တွင် အချင်းချင်း ရွေ့လျားနေစဉ် (အတွင်းလက်စွပ်၊ အပြင်လက်စွပ်နှင့် လှိမ့်ကိုယ်ထည်နှင့် နှိုင်းယှဉ်ပါက) ရိုးတံနှင့် ရေဒီယယ်ဝန်နှစ်မျိုးလုံးကို ထမ်းသည်။ ထို့ကြောင့် ဝက်ဝံကိုယ်တိုင်သည် မော်တာဖွဲ့စည်းပုံ၏ အာရုံခံနိုင်သော အစိတ်အပိုင်းတစ်ခုဖြစ်သည်။ ၎င်းသည် စက်မှုလုပ်ငန်းသုံး မော်တာများတွင် ဝက်ဝံအပြင်အဆင်၏ အရေးပါမှုကိုလည်း ဆုံးဖြတ်ပေးသည်။
လျှပ်စစ်တူးစက် ခွဲခြမ်းစိတ်ဖြာမှုပုံ
၂.၂ မော်တာတွင် လှိမ့်ဝင်နိုင်သော အတွင်းပိုင်း အပြင်အဆင်၏ အခြေခံအဆင့်များ
လျှပ်စစ်ကိရိယာမော်တာများတွင် လှိမ့်ဝင်နေသော ဝက်ဝံများ၏ အပြင်အဆင်သည် အင်ဂျင်နီယာများသည် လျှပ်စစ်ကိရိယာမော်တာများ၏ဖွဲ့စည်းပုံကို ဒီဇိုင်းဆွဲသောအခါ shafting အတွင်းရှိ စနစ်ထဲသို့ မတူညီသော ဝက်ဝံအမျိုးအစားများကို မည်သို့ထည့်သွင်းရမည်ကို ရည်ညွှန်းသည်။ မှန်ကန်သော မော်တာ ဝက်ဝံအစီအစဉ်ရရှိရန်၊ အောက်ပါတို့ကို လုပ်ဆောင်ရန် လိုအပ်သည်-
ပထမအဆင့်- ကိရိယာများတွင် လိပ်ဝင်ရိုးများ၏ အလုပ်လုပ်သည့်အခြေအနေကို နားလည်ပါ။ ၎င်းတို့တွင် အောက်ပါတို့ပါဝင်သည်-
- အလျားလိုက်မော်တာ သို့မဟုတ် ဒေါင်လိုက်မော်တာ
လျှပ်စစ်တူးစက်၊ လျှပ်စစ်လွှ၊ လျှပ်စစ်တံ၊ လျှပ်စစ်တူနှင့် အခြားမတူညီသောအမျိုးအစားများဖြင့် လျှပ်စစ်အလုပ်လုပ်ခြင်းသည် မော်တာကို ဒေါင်လိုက်နှင့် အလျားလိုက် bearing တပ်ဆင်မှုပုံစံဖြင့် အတည်ပြုပြီး ၎င်း၏ ဝန်ဦးတည်ရာကွဲပြားလိမ့်မည်။ အလျားလိုက်မော်တာများအတွက်၊ ဆွဲငင်အားသည် radial load ဖြစ်ပြီး ဒေါင်လိုက်မော်တာများအတွက်၊ ဆွဲငင်အားသည် axial load ဖြစ်သည်။ ၎င်းသည် မော်တာတွင် bearing အမျိုးအစားနှင့် bearing layout ရွေးချယ်မှုအပေါ် များစွာအကျိုးသက်ရောက်လိမ့်မည်။
- မော်တာ၏ လိုအပ်သော အမြန်နှုန်း
မော်တာ၏ အမြန်နှုန်းလိုအပ်ချက်သည် bearing ၏ အရွယ်အစားနှင့် bearing အမျိုးအစားရွေးချယ်မှုအပြင် မော်တာရှိ bearing ၏ ဖွဲ့စည်းပုံအပေါ် သက်ရောက်မှုရှိလိမ့်မည်။
- ပြောင်းလဲနေသောဝန်ကို ထမ်းဆောင်ခြင်း၏ တွက်ချက်မှု
မော်တာအမြန်နှုန်း၊ အဆင့်သတ်မှတ်ထားသော ပါဝါ/torque နှင့် အခြား parameters များအရ၊ ဘောလုံးဘယ်ရီများ၏ dynamic load ကိုတွက်ချက်ရန် (GB/T6391-2010/ISO 281 2007) ကိုကိုးကားပြီး သင့်လျော်သော ဘောလုံးဘယ်ရီအရွယ်အစား၊ တိကျမှုအဆင့် စသည်တို့ကို ရွေးချယ်ပါ။
- အခြားလိုအပ်ချက်များ- ဝင်ရိုးလမ်းကြောင်းလိုအပ်ချက်များ၊ တုန်ခါမှု၊ ဆူညံသံ၊ ဖုန်မှုန့်ကာကွယ်မှု၊ ဘောင်ပစ္စည်းကွာခြားမှု၊ မော်တာ၏စောင်းမှု စသည်တို့။
အတိုချုပ်ပြောရလျှင် လျှပ်စစ်ကိရိယာမော်တာ bearings များကို ဒီဇိုင်းဆွဲခြင်းနှင့် ရွေးချယ်ခြင်းမစတင်မီ၊ မော်တာ၏ လက်တွေ့လုပ်ငန်းခွင်အခြေအနေများကို ပြည့်စုံစွာနားလည်ရန် လိုအပ်ပြီး၊ ထို့ကြောင့် နောက်ဆုံးတစ်ခုကို ကျိုးကြောင်းဆီလျော်ပြီး ယုံကြည်စိတ်ချရသော ရွေးချယ်မှုဖြစ်စေရန် သေချာစေပါသည်။
အဆင့် ၃: bearing အမျိုးအစားကို ဆုံးဖြတ်ပါ။
ပထမအဆင့်နှစ်ဆင့်အရ၊ ရွေးချယ်ထားသော fixed end နှင့် floating end ၏ bearing load နှင့် shaft system structure ကို ထည့်သွင်းစဉ်းစားပြီးနောက် bearing bearing ဝိသေသလက္ခဏာများအရ fixed end နှင့် floating end အတွက် သင့်လျော်သော bearing အမျိုးအစားများကို ရွေးချယ်သည်။
၃။ ပုံမှန်မော်တာဘယ်ရင်းအပြင်အဆင်၏ ဥပမာများ
မော်တာဘယ်ရီဖွဲ့စည်းပုံ အမျိုးအစားများစွာရှိပါသည်။ အသုံးများသော မော်တာဘယ်ရီဖွဲ့စည်းပုံတွင် တပ်ဆင်ပုံနှင့် တည်ဆောက်ပုံအမျိုးမျိုးရှိသည်။ အောက်ပါတို့သည် အထင်ရှားဆုံး နှစ်ထပ်နက်ရှိုင်းသော groove ဘောလုံးဘယ်ရီဖွဲ့စည်းပုံကို ဥပမာအဖြစ် ယူထားသည်။
၃.၁ နှစ်ထပ်နက်ရှိုင်းသော groove ဘောလုံး bearing ဖွဲ့စည်းပုံ
နှစ်ထပ်နက်ရှိုင်းသော groove ဘောလုံးဝင်ဆံ့ဖွဲ့စည်းပုံသည် စက်မှုလုပ်ငန်းသုံး မော်တာများတွင် အသုံးအများဆုံး shaft တည်ဆောက်ပုံဖြစ်ပြီး ၎င်း၏ အဓိက shaft ထောက်ပံ့မှုဖွဲ့စည်းပုံကို နက်ရှိုင်းသော groove ဘောလုံးဝင်ဆံ့နှစ်ခုဖြင့် ဖွဲ့စည်းထားသည်။ နက်ရှိုင်းသော groove ဘောလုံးဝင်ဆံ့နှစ်ခုသည် အတူတကွ သယ်ဆောင်ကြသည်။
အောက်ပါပုံတွင်ပြထားသည့်အတိုင်း-
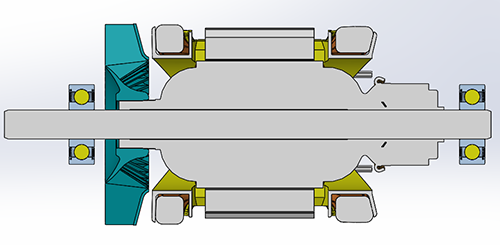
ဘီးရင်းပရိုဖိုင်
ပုံတွင်၊ shaft extension end bearing သည် positioning end bearing ဖြစ်ပြီး၊ non-shaft extension end bearing သည် floating end bearing ဖြစ်သည်။ bearing ၏ အစွန်းနှစ်ဖက်သည် shaft ပေါ်ရှိ radial load ကို ထမ်းဆောင်ပြီး (ဤဖွဲ့စည်းပုံတွင် shaft extension end တွင်တည်ရှိသည်) သည် shaft ၏ axial load ကို ထမ်းဆောင်သည်။
ပုံမှန်အားဖြင့် ဤဖွဲ့စည်းပုံ၏ မော်တာ bearing အစီအစဉ်သည် မော်တာ axial radial load မများစေရန် သင့်လျော်ပါသည်။ အဖြစ်များသည်မှာ micro motor ဖွဲ့စည်းပုံ၏ load ချိတ်ဆက်မှုဖြစ်သည်။
ပို့စ်တင်ချိန်: ၂၀၂၃ ခုနှစ်၊ ဇွန်လ ၁ ရက်